テンプレート
[テンプレート] ページでは、Kapplet のメインのベース オブジェクトとして機能するテンプレートを作成および編集できます。Kapplet はこのテンプレートの「コピー」と見なされます。テンプレートを変更しても、Kapplet は変更されません。テンプレートは、開発者、管理者、およびグローバル管理者が作成できます。
新しいテンプレートの作成
テンプレートを作成するには、[テンプレート] ページに移動して、次の手順を実行します。
-
ツールバーの [新しいテンプレートの作成]
 ボタンをクリックします。
ボタンをクリックします。 -
[一般] ステップ ページで次の情報を設定します。
-
[名前]: テンプレート名を入力します。
-
[ワークスペース]: 使用可能なワークスペースのドロップダウン リストからワークスペースを選択します。
-
[説明]: 短い説明を入力して、テンプレートに関する情報を追加します。
-
[アイコン]: アイコンを追加することで、テンプレートを一意にして区別しやすくします。デフォルトでは、アイコンはワークスペースから継承されます。アイコンを変更するには、[ギャラリー] から画像を選択するか、新しい画像をアップロードします。アップロードされた画像に、他の画像の中から特定しやすくするためのタグを設定します。
画像 [ギャラリー] では、.png および .jpeg ファイルのみがサポートされます。
-
-
[次へ] をクリックして、次のステップに進みます。
-
[ロボット] ステップ ページで、テンプレートにロボットを追加します。
選択したロボットが、ウィンドウの左側にある [選択したロボット] ペインに表示されます。このペインを開くには、ツールバーの [選択したロボット]
 ボタンをクリックします。選択したロボットの番号がボタンに反映されます。[選択したロボット] ペインの [順次実行] ボタンを使用して、ロボットの実行順序を定義します。
ボタンをクリックします。選択したロボットの番号がボタンに反映されます。[選択したロボット] ペインの [順次実行] ボタンを使用して、ロボットの実行順序を定義します。[設定] ペインで、Management Console プロジェクトを基準としてロボットをフィルタすることもできます。
[次へ] をクリックして、次のステップに進みます。
-
[入力] ステップ ページで、選択したロボットの入力パラメータを設定します。
選択したロボットのいずれかに入力パラメータが含まれている場合は、プロシージャにこのステップが追加されます。-
ロボットをクリックして、変数 (変数のタイプ) を表示します。
-
ロボット変数が表示されたウィンドウで変数をクリックし、その属性を設定します。
-
変数ウィンドウの隣のウィンドウに、すべての属性がリストされます。
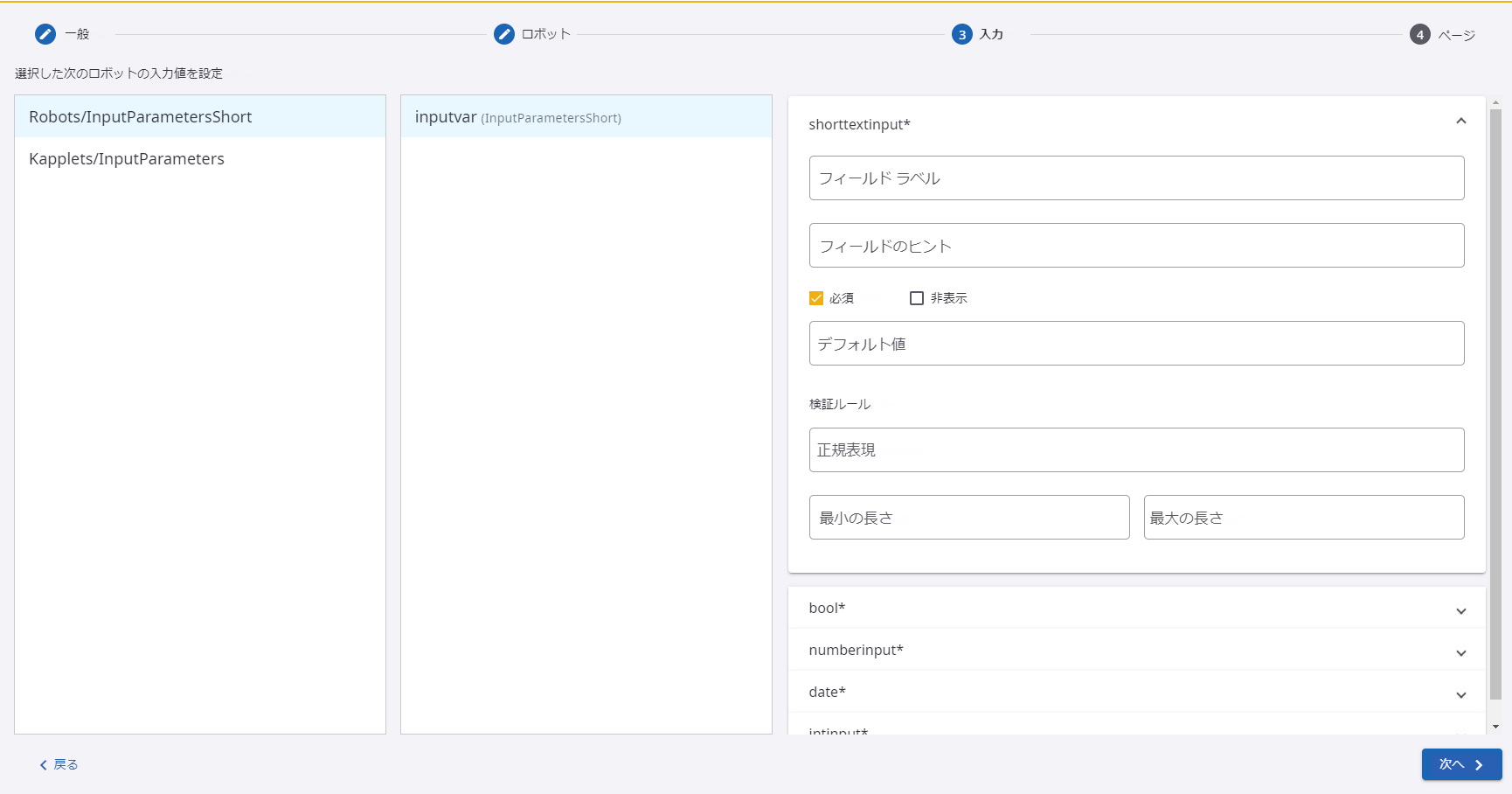
属性ペインで、[開始] ページに表示する [フィールド ラベル] および [フィールドのヒント] を入力します。
[必須] および [非表示] チェック ボックスを使用して、[開始] ページにフィールドを反映させる方法を設定します。
属性のパラメータを個別に設定します。パラメータの組み合わせは各属性に依存するため、図とは異なる場合があります。
[次へ] をクリックして、次のステップに進みます。
-
-
[ページ] ステップ ページには、次の設定が含まれています。
-
[開始] ページでページ タイトルを編集し、[ページ テキスト] フィールドにページの説明を入力します。[フィールドの順序] リストでアイテムをドラッグして、フィールドの順序を変更します。
-
[ステータス ページ] でページ タイトルを編集します。
- 実行結果をテーブルに表示するには、ツールバーの [テーブル ページの追加]
 アイコンをクリックします。[テーブル ページ] でページのタイトルおよび説明を編集します。ドロップダウン リストでロボットを選択し、パラメータを設定します。[返されるタイプ] リストは、選択したロボットの出力タイプで構成されています。パラメータをクリックして、テーブルのフィールドを定義します。
アイコンをクリックします。[テーブル ページ] でページのタイトルおよび説明を編集します。ドロップダウン リストでロボットを選択し、パラメータを設定します。[返されるタイプ] リストは、選択したロボットの出力タイプで構成されています。パラメータをクリックして、テーブルのフィールドを定義します。[利用可能なコミット アクション]: 2 つのロボットを連続で使用するときに、メイン ロボットの出力データを 2 つ目のロボットの入力データとして使用することが必要になる場合があります。このオプションを使用して、各ロボットにアクションをコミットするためのそれぞれ異なるロボットを割り当てます。詳細については、「コミット アクションのロボットの選択」を参照してください。
-
実行結果をグラフに表示するには、ツールバーの [グラフ ページの追加]
 アイコンをクリックします。[グラフ ページ] でページのタイトルおよび説明を編集します。ドロップダウン リストでロボットを選択し、グラフに表示するパラメータを設定します。次のパラメータを選択します。
アイコンをクリックします。[グラフ ページ] でページのタイトルおよび説明を編集します。ドロップダウン リストでロボットを選択し、グラフに表示するパラメータを設定します。次のパラメータを選択します。-
グラフのタイプ
-
配色
-
ラベル軸
-
データ軸
他のグラフ パラメータも定義します。
[プレビュー]
 ボタンをクリックしてグラフの画像をプレビューします。
ボタンをクリックしてグラフの画像をプレビューします。 -
-
-
[保存] をクリックしてテンプレートを保存します。
テンプレートのエンティティは次のようになります。
テンプレートの編集
テンプレートを編集または削除するには、[コンテキスト メニューを開く]  ボタンをクリックします。
ボタンをクリックします。
コミット アクションのロボットの選択
2 つのロボットを連続で使用するときに、メイン ロボットの出力データを 2 つ目のロボットの入力データとして使用することが必要になる場合があります。そのようなロボットは、入力タイプと出力タイプをそれぞれ 1 つだけ持ち、それらのタイプが異なることが許容されるように設計する必要があります。メイン ロボットに複数の出力タイプがある場合は、それぞれのアクションをコミットするために異なるロボットを割り当てることができます。入力タイプと出力タイプは一致している必要があります。
- ロボット間でデータの受け渡しを行うには、[テンプレート] に移動し、新しいテンプレートを作成するか既存のテンプレートを編集します。[ページ] ステップに到達するまで構成ウィンドウの中を進みます。
-
[返されるタイプ] リストを探します。このリストでは、選択したロボットの出力タイプを確認できます。アクションのコミットに利用可能なタイプと利用できないタイプは、別々のカードに表示されます。
利用可能なタイプの右側には、[利用可能なコミット アクション] ペインが表示されています。ドロップダウン リストから必要なロボットを選択します。利用可能な返されるタイプに、必要なすべてのロボットを一度に割り当てることができます。
入力タイプと出力タイプを同じにする必要があります。使用するタイプの前に、「コミット アクションに使用できるロボットはありません」という通知が表示されているかどうかをよく確認してください。
- メイン ロボットの実行が終了したら、メニューの [履歴] ページに移動します。[テーブル ページ] タブで、ステップ 2 で設定したロボットのリストを確認できます。
[コミット アクション用に選択] チェックボックスをオンにして、1 つ以上のロボットを選択します。テーブルの右上隅にある [コミット アクション] ボタンがアクティブになったら、それをクリックして実行結果を確認します。同じロボットを 2 回実行することはできません。