Variables et types dans les robots
Le workflow du robot  peut prendre les données d'un Robot à Moteur Basique
peut prendre les données d'un Robot à Moteur Basique ![]() et utiliser les mêmes types de variable avec quelques ajouts.
et utiliser les mêmes types de variable avec quelques ajouts.
Les variables utilisées dans les robots peuvent être d'origine différente. Vous pouvez créer de nouvelles variables à partir du menu contextuel sans interrompre votre travail et en passant à la section Variables. Il est possible de modifier des variables existantes sans réinitialiser l'état d'exécution du workflow du robot. Les variables d'entrée sont modifiées dans le Robot à Moteur Basique. Certaines des valeurs de sortie peuvent être associées à des variables créées dans le robot.
-
Pour créer une variable dans un robot, utilisez la zone Variables dans le volet Attributs du robot. Insérez le nom de l'attribut et sélectionnez son type dans la liste déroulante de la zone. Voir Modifier les robots pour plus d'informations.
-
Vous pouvez créer des variables de nouveaux types à tout moment, quel que soit l'état d'exécution du workflow du robot. Pour ce faire, allez dans . Ensuite, de nouveaux types et variables deviennent disponibles pour utilisation.
-
Vous pouvez modifier les variables existantes sans réinitialiser l'état d'exécution du workflow du robot. Pour ce faire, faites un clic droit sur une étape d'activité et cliquez sur .
-
Pour faire apparaître la valeur d'une variable dans la sortie, définissez son type dans la zone Types de retour du volet Attributs.
-
Vous pouvez utiliser des variables simples et complexes et leurs attributs comme entrée dans le workflow du robot. Configurez tous les paramètres des variables d'entrée dans le Robot à Moteur Basique, puis ajoutez-les à la zone Entrée du volet Attributs du robot. Pour plus d'informations, voir Types d'entrée et de retour du robot.
-
Vous pouvez utiliser toutes les variables complexes de votre Robot à Moteur Basique pour créer des variables d'enregistrement dans le workflow du robot.
- Les variables locales ne peuvent être créées et utilisées que dans les étapes de groupe. Si vous souhaitez que votre étape utilise une variable locale, incluez l'étape dans un groupe avec une variable locale. Voir Configurer les variables pour plus d'informations sur les types de variables.
-
Les variables de type mot de passe dans un robot peuvent transférer leur valeur depuis et vers une variable de type mot de passe créée dans un Robot à Moteur Basique. Vous ne pouvez pas attribuer manuellement une valeur à la variable du type mot de passe dans le workflow du robot.
Variables et types simples
La variété des variables simples dans les robots diffère de celles utilisées dans les Robots à Moteur Basique. Voir Attributs de type pour les Robots à Moteur Basique.
Les robots peuvent utiliser un nombre limité de types de variable avec des valeurs par défaut définies, notamment :
- Binaire : Vide
- Booléen : false
- Entier : 0
- Nombre : 0,0
- Mot de passe : Vide
- Texte : ""
Variables et types complexes
Actuellement, les robots peuvent traiter des variables de type simple et des variables de type d'enregistrement.
Les types d'enregistrement sont les mêmes que les types complexes, à la différence que les types complexes ne sont pas fournis tels quels au robot par le Robot à Moteur Basique, mais que les types d'enregistrement proviennent essentiellement des types complexes utilisés dans le Robot à Moteur Basique. En raison des types avec les mêmes noms dans le robot et le Robot à Moteur Basique, les variables peuvent être utilisées facilement sans aucune erreur.
Vous pouvez utiliser une variable complexe et ses attributs comme entrée dans le workflow du robot. Voir Types d'entrée et de retour du robot pour plus d'informations.
Enregistrer les variables
Les variables d'enregistrement sont basées sur les types d'enregistrements (variables complexes) qu'un robot utilise.
Par exemple, un enregistrement de type « Identifiants » se compose de deux champs : un nom d'utilisateur et un Mot de passe. Si un utilisateur crée une variable de type « Identifiants » (par exemple, « userCred »), les champs peuvent être définis comme suit : un Nom d'utilisateur « Joe » et un Mot de passe « Motdepasse ». Cette information est représentée dans la vue Statut. Ensuite, la valeur de la variable peut être modifiée en attribuant une autre valeur (par exemple, « Tom ») à userCred.username dans l’étape Assigner. Dans le champ Nom d'utilisateur, cela remplace la valeur par « Tom », tandis que le champ Mot de passe ne change pas.
-
Vous pouvez attribuer à chacun des variables d'enregistrement de même type.
-
Les types d'enregistrement peuvent contenir des champs de type Date, Temps et DateTime. Si vous créez un type complexe de type Date, vous pouvez spécifier le champ correspondant dans le type d'enregistrement dérivé comme étant Date, Temps ou DateTime (par défaut).
-
Vous pouvez attribuer aux attributs des variables d'enregistrement des valeurs de même type ou en attribuer à d'autres attributs ou des variables simples de même type.
Tous les menus contextuels de la vue Enregistreur qui utilisent des variables vous permettent de choisir un champ parmi les variables de type Enregistrement.
Par exemple, Saisir du texte peut obtenir sa valeur à partir de champs de variables complexes, et si le type de la variable sélectionné n'est pas du texte, une fonction de conversion est insérée pour convertir la valeur en texte. Les variables et les champs de types qui ne peuvent pas être convertis en texte n'apparaissent pas dans la liste.
Pour l'étape d'extraction, vous pouvez également effectuer une extraction vers des champs de variables complexes, mais le type de champ doit correspondre au type des données extraites, comme du texte ou des données binaires (pour les images). Seules les variables du type correct apparaissent dans le menu.
Les valeurs par défaut personnalisées définies dans un Robot à Moteur Basique sont traitées comme des valeurs de test. Elles ne sont pas transférées comme valeurs par défaut au robot. Pour définir une valeur par défaut pour une variable dans un robot, faites un clic droit sur une étape d'activité et cliquez sur .
Types de champ d'enregistrement Date, Temps et DateTime
Les types d'enregistrement peuvent contenir des champs de type Date, Temps et DateTime. Ces types correspondent au type Date des Robots à Moteur Basique et sont conçus pour être utilisés exclusivement dans les robots pour gérer la date et l'heure.
| Type | Description |
|---|---|
| Date | Date est un type qui représente une date sans référence à une heure ou à un fuseau horaire. Une variable de type Date a la valeur par défaut 1601-01-01. |
| Temps | Temps est un type qui représente une heure sans référence à une date ou à un fuseau horaire. Une variable de type Temps a la valeur par défaut 00:00:00. |
| DateTime | DateTime est un type qui représente une date et une heure avec un fuseau horaire dans le système de calendrier ISO 8601, qui est essentiellement une valeur de date et d'heure avec un fuseau horaire. La valeur par défaut d'une variable DateTime est composée des types par défaut de ses composants Date et Temps, le fuseau horaire par défaut correspondant à l'emplacement où le robot s'exécute. |
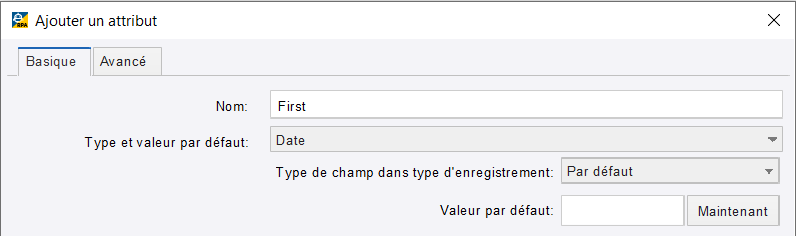
Pour définir un type qui contiendra un type de champ d'enregistrement Date, Temps ou DateTime, vous devez créer un type complexe avec un attribut de type Date et définir le type de champ d'enregistrement pour cet attribut. Vous pouvez ajouter autant d'attributs Date que nécessaire. Cette procédure montre comment créer un type complexe avec trois attributs Date, chacun ayant un type de champ d'enregistrement différent.
-
Après avoir créé un type, ajoutez un attribut de type Date. Dans la configuration de l'attribut, assurez-vous que Type de champ dans type d'enregistrement est défini sur Par défaut. La valeur par défaut correspond au type DateTime.
-
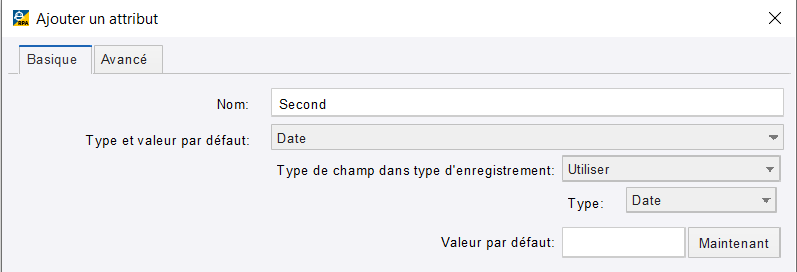
Ajoutez un autre attribut de type Date, définissez Type de champ dans type d'enregistrement sur Utiliser, puis définissez Type sur Date.
-
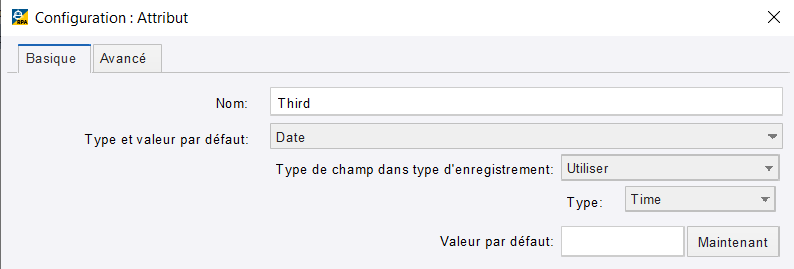
Ajoutez un attribut en plus de type Date, définissez Type de champ dans type d'enregistrement sur Utiliser, puis définissez Type sur Temps.
Le type de résultat contient trois attributs de type Date, chacun ayant un type de champ d'enregistrement différent.

Dans l'éditeur de robot , le volet Statut reflète le type d'enregistrement résultant avec les valeurs Date, Temps et DateTime.
Remarque :
-
Vous pouvez utiliser les types Date, Temps et DateTime comme variables dans les robots. Ces types sont conçus spécifiquement pour être utilisés avec des robots. Les types Date et Temps contiennent respectivement une date et l'heure du jour. DateTime contient à la fois une date et l'heure du jour, ainsi que le fuseau horaire.
-
Les types Date et Temps ne peuvent pas être utilisés comme variables d'entrée dans les robots.
-
DateTime peut être utilisé à la fois comme variables d'entrée et de sortie dans les robots. La variable de type Date d'un Robot à Moteur Basique peut être transmise en entrée à la variable d'entrée DateTime dans le robot, et la valeur DateTime peut être renvoyée en sortie à la variable Date de type simple dans le Robot à Moteur Basique. Semblable au type simple Date, le type DateTime contient une date et l'heure du jour.