オートメーション デバイスの準備
ロボットが実行できるオートメーション デバイスは次のとおりです。ローカルの Windows コンピュータ、ロボットが実行されているコンピュータ、またはロボットが到達できる IP アドレスにあるリモートの Windows コンピュータ。リモート コンピュータは、ロボットがそのコンピュータを制御できるようにするための Desktop Automation サービスを実行している必要があります。
ターミナル セッションを自動化する方法については、ターミナル エミュレータの自動化 を参照してください。
-
プロジェクトのワークフローでリモート コンピュータに接続するには、最初にデバイス マッピングを作成します。この操作を行うには、 をクリックします。新しいマッピングを作成してから、ロボットの編集に進みます
 。「オートメーション デバイス マッピングの追加」を参照してください。
。「オートメーション デバイス マッピングの追加」を参照してください。 -
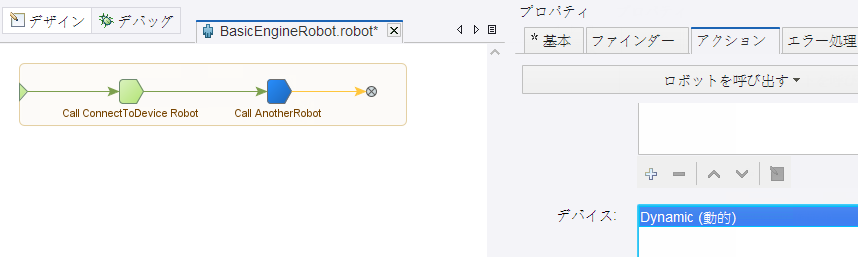
ベーシック エンジン ロボット
 で「ロボットを呼び出す」ステップの [アクション] タブの [デバイス] フィールドにある [追加]
で「ロボットを呼び出す」ステップの [アクション] タブの [デバイス] フィールドにある [追加]  をクリックして、デバイス リファレンスを入力します。
をクリックして、デバイス リファレンスを入力します。 -
[デバイスの追加] ウィンドウで、[静的リファレンス]、[動的リファレンス]、または [トリガー リファレンス] を選択します。
-
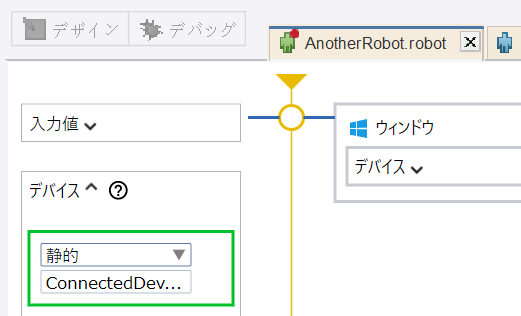
静的リファレンスは、選択する 1 つ以上のオートメーション デバイス マッピングを作成したことを意味します。ロボットにより、選択したマッピングと関連付けられているデバイスが自動化されます。マッピング情報は Windows デバイスの自動化に必要ですが、組み込みブラウザおよびロボット用の組み込み Excel ドライバーで操作するターミナルの自動化には必要ありません。マッピングを変更する場合、Design Studio の [更新] をクリックして、接続を更新します。ローカル Desktop Automationを使用する場合、静的リファレンスを使用します。
-
動的リファレンスは、リモート デスクトップ プロトコル (RDP) 接続などを使用して、オートメーション デバイスにシングル ユーザー モードで接続できるようにするリファレンスのタイプです。デバイスに接続ステップで使用するマッピング名を指定します。その他のすべての接続パラメータは、ロボット ワークフロー内で指定します。「ロボットの呼び出し」ステップでロボットが動的リファレンス接続を使用した後に、デバイスを接続すると、接続は維持され、このリファレンス (およびこのデバイス) はロボットの次の「ロボットを呼び出す」ステップで使用できるようになります。
ワークフローの実行中は、同じデバイスに一度しか接続できません。たとえば、ループ内のデバイスに接続する場合、接続がすでに確立されているときには、ロボットがループ内の接続ステップをスキップすることを確認します。
-
トリガー リファレンスで参照は、選択する 1 つ以上のオートメーション デバイス マッピングを作成したことを意味します。自動化されたアテンデッド オートメーション ロボットは選択したマッピングに関連付けられたデバイスに接続します。デバイス マッピングを作成する場合、デバイスのホスト、ポート、およびトークンを指定します。「オートメーション デバイス マッピングの追加」を参照してください。
組み込みのブラウザで Web サイトにアクセスしたり、組み込み Excel ドライバーで Excel スプレッドシートを操作したりするなど、ローカル コンピュータで実行される操作に対する参照は指定しないでください。"local" の参照は、他の参照が指定されているかどうかに関係なく、デフォルトで常に利用可能です。
-
-
前のステップでオートメーション デバイスを追加した場合は、ロボットを編集します
。ロボットの編集 および デバイス の定義を参照してください。
ロボット間で動的デバイスを渡す
ロボット内の静的デバイスは、接続がすでに確立されているデバイスです。ロボットを呼び出す ステップにベーシック エンジン ロボットの [デバイス] プロパティで動的マッピングが指定されており、デバイスがすでに接続されている場合は、この動的マッピングが静的デバイスに渡されます。つまり、デバイスがすでに動的マッピングを使用して接続されている場合は、ロボットの [デバイス] ペインで静的デバイスの使用を選択することで、動的マッピングを使用して確立された接続を再利用できます。これは、このロボットを別のベーシック エンジン ロボットで再利用する必要がある場合に便利です。