Préparer des dispositifs d'automatisation
Les dispositifs d'automatisation que les robots peuvent exécuter sont les suivants : un ordinateur Windows local, celui sur lequel le robot s'exécute, ou un ordinateur Windows distant à une adresse IP accessible au robot. L'ordinateur distant doit exécuter un Desktop Automation Service qui permet au robot de contrôler cet ordinateur.
Pour automatiser les sessions de terminal, voir Automatiser les émulateurs de terminal.
-
Pour vous connecter à un ordinateur distant dans le workflow de votre projet, créez d'abord un mappage de dispositif. Pour ce faire, cliquez sur . Créez un nouveau mappage, puis procédez à la modification du fichier Robots
 . Voir Ajouter un mappage de dispositif d'automatisation.
. Voir Ajouter un mappage de dispositif d'automatisation. -
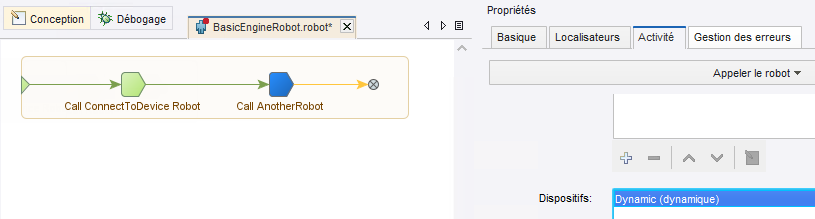
Fournissez une référence de dispositif en cliquant sur Ajouter
 dans le champ Dispositifs dans l'onglet Activité de l'étape Appeler le robot dans le Robot à Moteur Basique
dans le champ Dispositifs dans l'onglet Activité de l'étape Appeler le robot dans le Robot à Moteur Basique  .
. -
Dans la fenêtre Ajouter un dispositif , sélectionnez Référence statique, Référence dynamique ou Référence de déclencheur.
-
Une référence statique signifie que vous avez créé un ou plusieurs mappages de dispositif d'automatisation parmi lesquels vous pouvez choisir. Le robot automatise les dispositifs associés au mappage sélectionné. Les informations de mappage sont nécessaires pour l'automatisation des dispositifs Windows mais ne sont pas requises pour l'automatisation des terminaux, en utilisant le navigateur intégré et le pilote Excel intégré pour les robots. Si vous modifiez le mappage, cliquez sur Actualiser dans Design Studio pour renouveler la connexion. Utilisez une référence statique lorsque vous utilisez Local Desktop Automation.
-
Une référence dynamique est un type de référence qui permet de vous connecter aux dispositifs d'automatisation en mode Utilisateur Unique, par exemple en utilisant la connexion RDP (Remote Desktop Protocol). Indiquez un nom de mappage à utiliser dans l'étape Se connecter au dispositif. Tous les autres paramètres de connexion sont spécifiés dans le workflow du robot. Une fois que la connexion Référence dynamique a été utilisée par le robot dans l'étape Appeler le robot et que le dispositif est connecté, la connexion reste active, et vous pouvez utiliser cette référence (et ce dispositif) dans les étapes Appeler le robot suivantes dans votre robot.
Vous ne pouvez vous connecter au même dispositif qu'une seule fois pendant l'exécution d'un workflow. Par exemple, si vous souhaitez vous connecter à un dispositif dans une boucle, assurez-vous que le robot ignore l'étape de connexion dans la boucle lorsque la connexion est déjà établie.
-
La référence de déclencheur implique que vous avez créé un ou plusieurs mappages de dispositifs d'automatisation parmi lesquels vous pouvez choisir. Les robots d'automatisation assistés se connectent aux dispositifs associés au mappage sélectionné. Lors de la création d'un mappage de dispositif, spécifiez l'hôte, le port et le jeton du dispositif. Voir Ajouter un mappage de dispositif d'automatisation.
Ne fournissez aucune référence pour les opérations exécutées sur l'ordinateur local, telles que l'accès aux sites web dans le navigateur intégré et l'utilisation de feuilles de calcul Excel dans le pilote Excel intégré. La référence « local » est toujours disponible par défaut, que d'autres références soient fournies ou non.
-
-
Si vous avez ajouté des dispositifs d'automatisation dans les étapes précédentes, modifiez le robot
. Voir les définitions de Modifier le robot et Dispositifs.
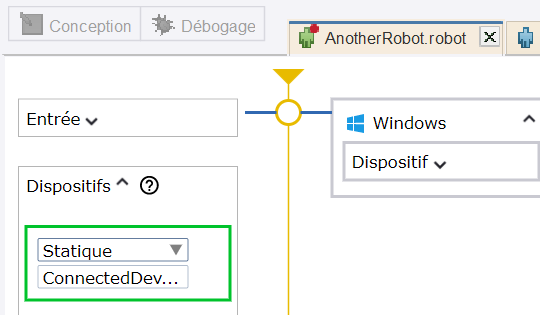
Passer des dispositifs dynamiques entre les robots
Un dispositif statique dans un robot est un dispositif avec lequel la connexion est déjà établie. Si un mappage dynamique est spécifié pour une étape Appeler le robot dans la propriété Dispositifs du Robot à Moteur Basique et que le dispositifs a déjà été connecté, ce mappage dynamique peut être transmis à un dispositif statique. En d'autres termes, si le dispositif est précédemment connecté à l'aide du mappage dynamique, dans le volet Dispositifs du robot, vous pouvez choisir d'utiliser un dispositif statique et de réutiliser la connexion établie avec le mappage dynamique. C'est pratique lorsque vous devez réutiliser ce robot dans différents Robots à Moteur Basique.