Mise en route
Les instructions suivantes supposent que vous avez installé Kofax RPA sur un de vos ordinateurs. Pour des informations sur l'utilisation de Kofax RPA, voir le « Guide de démarrage rapide » dans le Guide d'installation de Kofax RPA.
-
Pour automatiser les dispositifs, voir Service Desktop Automation.
-
Pour automatiser les applications de terminal, voir Automatiser les émulateurs de terminal.
-
Une fois les tâches d'installation et de configuration terminées, ouvrez Design Studio.
La plupart des tâches d'installation et de configuration sont effectuées par un administrateur ou un rôle similaire.
-
Créez un robot.
-
Cliquez sur .
-
Indiquez un nom pour le robot et sélectionnez un projet.
-
Cliquez sur Terminer.
Le nouveau robot apparaît sur un nouvel onglet dans la fenêtre de l'éditeur. Les Robots à Moteur Basique sont identifiés par une icône bleue
 et les robots sont identifiés par une icône verte
et les robots sont identifiés par une icône verte  .
.Effectuez une modification de base du workflow du robot.
Pour exécuter un robot, ainsi que pour automatiser des applications externes, interagir avec des données, suivez l'état du robot dans la Vue de l'enregistreur et suivez l'état des variables dans le Volet Statut, appelez le robot à partir d'un Robot à Moteur Basique.
-
-
Ouvrez un Robot à Moteur Basique existant ou créez-en un en cliquant sur .
-
Pour permettre l'exécution du Robot à Moteur Basique, cliquez sur Préparer l'exécution
 dans la barre d'outils ou dans le volet Applications.
dans la barre d'outils ou dans le volet Applications. -
Pour passer le privilège d'exécution d'un robot à un autre, ouvrez l'onglet avec le robot requis et cliquez sur Préparer l'exécution.
Un seul Robot à Moteur Basique peut avoir le privilège d'exécution. Alors que plusieurs Robots à Moteur Basique peuvent s'exécuter en mode Débogage, un seul Robot à Moteur Basique peut avoir le privilège de s'exécuter en mode Conception. Le robot qui a le privilège de s'exécuter en mode Conception peut également fonctionner en même temps en mode Débogage, vous permettant de passer d'un mode à l'autre. Pour plus d'informations, voir Mode Débogage.
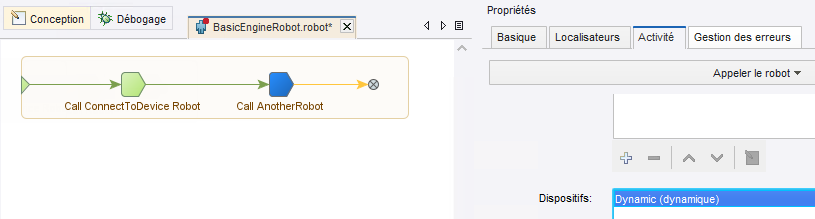
Lorsqu'un robot a le privilège d'exécution, l'onglet de ce robot est marqué d'un point rouge. Tous les autres robots en cours d'exécution ont leurs onglets mis en surbrillance, comme indiqué sur l'image ci-dessous.

-
Insérez une étape Appeler le robot dans le Robot à Moteur Basique.
-
Dans la liste déroulante Robot de l'étape, sélectionnez le robot créé à l'étape 4.
Plus tard, vous pouvez créer un nouveau robot en cliquant sur Créer un nouveau dans la liste déroulante Robot. Si vous créez un nouveau robot après avoir spécifié les valeurs et les mappages du Robot à Moteur Basique, le nouveau robot héritera de ces propriétés.
- Configurez les valeurs d'entrée, les variables de retour et les dispositifs. Consultez Préparer des dispositifs d'automatisation et Mappage des dispositifs d'automatisation. Si vous souhaitez automatiser uniquement les applications de terminal, ignorez la configuration des dispositifs.
-
-
Lorsque l'exécution est autorisée, exécutez le workflow dans l'étape Appeler le robot, puis cliquez sur Robot Entrer
 dans la barre d'outils.
dans la barre d'outils.L'onglet avec votre robot s'ouvre et vous pouvez maintenant modifier le robot et l'exécuter.
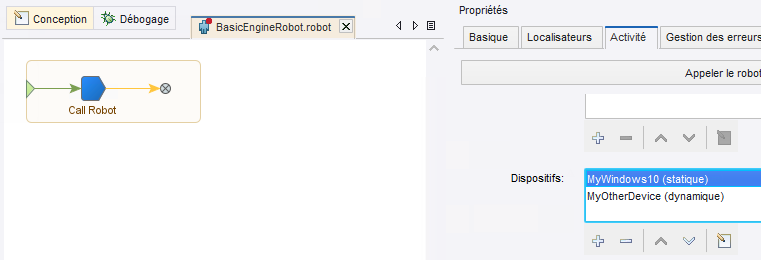
- Pour automatiser des applications externes, indiquez les dispositifs d'automatisation dans la zone Dispositifs. Si vous ne devez automatiser que des applications de terminal, ignorez cette étape.
-
Le nombre de dispositifs spécifié dans le Robot à Moteur Basique et le robot doit correspondre.
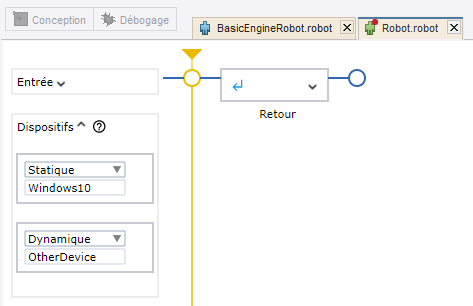
- Les noms de dispositif que vous définissez dans le robot peuvent différer de ceux du Robot à Moteur Basique. Dans l'éditeur de robot, vous pouvez renommer le dispositif depuis le menu contextuel si nécessaire. Lorsque le dispositif est renommé ici, le changement de nom se reflète dans toutes les étapes où le dispositif est utilisé.
-
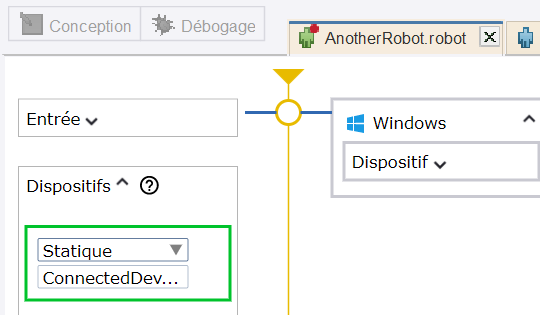
Un dispositif statique dans un robot est un dispositif avec lequel la connexion est déjà établie. Si le mappage dynamique est spécifié pour une étape Appeler le robot dans la propriété Dispositifs d'un Robot à Moteur Basique, et que le dispositif était auparavant connecté à l'aide d'un mappage dynamique, dans le volet Dispositifs du robot, vous pouvez choisir d'utiliser un dispositif statique et de réutiliser la connexion établie avec le mappage dynamique. C'est pratique lorsque vous voulez réutiliser ce robot dans différents Robots à Moteur Basique.
-
-
Élaborez le workflow d'automatisation du robot et exécutez ce workflow pour le voir en action.
S'il s'agit d'une mise à niveau depuis Kofax RPA versions 10.7.0 et antérieures, voir Convertir l'ancienne étape d'activité Desktop Automation.
-
Une fois que vous avez terminé la conception de votre robot, vous pouvez l'exécuter pour automatiser les dispositifs.
-
Pour quitter le robot et travailler sur le Robot à Moteur Basique, exécutez l'intégralité du workflow du robot, puis cliquez sur Étape dehors
 dans la barre d'outils.
dans la barre d'outils.Dans le Robot à Moteur Basique, l'étape Appeler le robot s'affiche comme ayant été exécutée.
-
Pour fermer le robot sans l'exécuter jusqu'au bout ou renvoyer un résultat, cliquez sur Quitter le robot
 dans la barre d'outils.
dans la barre d'outils.Dans le Robot à Moteur Basique, l'étape Appeler le robot s'affiche comme n'ayant pas été exécutée.
-
Convertir l'ancienne étape d'activité Desktop Automation
Dans Kofax RPA version 10.7.0 et antérieure, un éditeur Desktop Automation autonome était utilisé pour modifier le workflow du robot contenu dans une étape d'activité Desktop Automation. À partir de Kofax RPA 11.0.0, vous pouvez exécuter des étapes d'activité Desktop Automation créées sous la version 10.7.0 ou antérieure, mais pour modifier le workflow, vous devez extraire le workflow de l'étape dans un nouveau robot et changer l'étape Desktop Automation en une étape Appeler le robot, qui fera référence au nouveau robot.
Vous pouvez exporter des Robots à Moteur Basique et des snippets contenant les étapes Desktop Automation.
-
Avant l'exportation, prévisualisez un robot en l'ouvrant et en sélectionnant l'étape Desktop Automation, puis cliquez sur Aperçu dans les propriétés de l'étape pour voir à quoi cela ressemblerait après l'exportation.
-
Convertissez et exportez depuis l'arborescence Projets :
-
Pour convertir une étape d'activité en robot pour un seul robot, faites un clic droit sur un Robot à Moteur Basique contenant une étape Desktop Automation.
-
Pour convertir plusieurs robots, dans la vue Projets, faites un clic droit sur n'importe quel dossier ou sélectionnez et faites un clic droit sur plusieurs Robots à Moteur Basique contenant des étapes Desktop Automation.
Une boîte de dialogue apparaît listant les étapes Desktop Automation disponibles pour extraction.
-
-
Cliquez sur Exporter les robots.
-
Si nécessaire, attribuez un nouveau nom descriptif au robot sélectionné, prévisualisez le robot et affichez l'étape Desktop Automation dans le Robot à Moteur Basique qui le contient.
-
Cliquez sur
 pour renommer le fichier sélectionné.
pour renommer le fichier sélectionné. -
Cliquez sur
 pour prévisualiser le robot sélectionné qui sera créé après l'exportation.
pour prévisualiser le robot sélectionné qui sera créé après l'exportation. -
Cliquez sur
 pour afficher l'étape Desktop Automation sélectionnée dans le Robot à Moteur Basique qui la contient.
pour afficher l'étape Desktop Automation sélectionnée dans le Robot à Moteur Basique qui la contient.
La modification du niveau de zoom dans la fenêtre Aperçu du workflow affecte le niveau de zoom de l'éditeur de robot.
-
-
Cliquez sur Suivant pour sélectionner un emplacement pour les robots exportés dans le projet en cours.
-
Cliquez sur Terminer pour fermer la boîte de dialogue et lancer l'exportation.
Le résumé de l'exportation apparaît, indiquant le nombre de robots et de snippets exportés. Tous les dispositifs requis configurés dans les Robots à Moteur Basique apparaissent automatiquement dans les robots.