ロボットの入力と出力
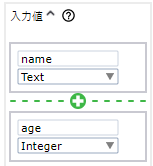
入力値
ロボット  がベーシック エンジン ロボット
がベーシック エンジン ロボット ![]() から呼び出されたときに、入力値のリストが渡される場合があります。ロボットは、これらの値にアクセスするために、ロボット エディターの [入力値] セクションで定義された入力パラメータの一致リストを使用します。
から呼び出されたときに、入力値のリストが渡される場合があります。ロボットは、これらの値にアクセスするために、ロボット エディターの [入力値] セクションで定義された入力パラメータの一致リストを使用します。
入力パラメータの数は入力値の数と一致する必要があります。また、それらのタイプは、対応する値のタイプと一致する必要があります。入力値は、並び順に入力パラメータにバインドされます。
ロボット内では、式でパラメータを使用できます。そのためには、変数を使用するのと同じように、それらのパラメータを名前で参照する必要があります。つまり、固定値「Age」という入力パラメータがある場合、これを「Age」という変数であるかのように使用できます。大きな違いは、ロボットが入力パラメータを変更できず、ユーザーは割り当てステップや変数を使用できるワークフローの他の部分でこれを変数として使用できないことです。
- 新しい入力パラメータの追加
- 新しい入力パラメータを追加するには、プラス記号をクリックした後に、名前を入力してタイプを選択することでパラメータを設定します。
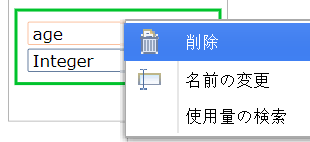
- 入力パラメータの削除
- 入力パラメータを削除するには、パラメータを右クリックし、[削除] をクリックします。
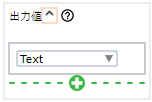
出力値
ロボット を実行して、実行が戻るステップに到達すると、ロボットは、そのロボットを呼び出しているベーシック エンジン ロボットに値を返します。このような値は、ロボットの「出力値」と呼ばれます。
ロボットのすべての戻るステップでは、[出力値] セクションの定義の数とタイプに一致する値のリストが返されます。値のリストが返されない場合は、このルールに違反するステップに対してエラーが表示されます。
- 新しい出力パラメータの追加
- 新しい出力パラメータを追加するには、プラス記号をクリックし、タイプを選択します。
- 出力パラメータの削除
- 出力パラメータを削除するには、パラメータを右クリックし、[削除] をクリックします。

注 出力パラメータを削除する際は、対応する出力値もすべての[戻る]ステップから削除する必要があります。