
テンプレート
[テンプレート] ページを使用して、Kapplet のベースとなるテンプレートの作成、並べ替え、および編集を行います。
テンプレートは、開発者、管理者、およびグローバル管理者が作成できます。
テンプレートの詳細については、以下のトピックを参照してください。
テンプレートの作成
-
[テンプレート] ページに移動します。
-
プラス記号を選択して新しいテンプレートを作成します。
-
[一般] ページで次の情報を設定します。
-
名前: テンプレート名を入力します。
-
[ワークスペース]: ドロップダウン リストからワークスペースを選択します。
-
[説明]: 短い説明を入力して、テンプレートに関する情報を追加します。
-
[タイムアウト値] と [時間単位]: 希望するタイムアウト値を設定し、時間単位を選択して、ロボットが RoboServer のキューに留まる時間を指定します。このタイムアウトは、テンプレート内のすべてのロボットに適用されます。デフォルトは 600 秒です。
-
[アイコン]: アイコンを追加することで、テンプレートを一意にして区別しやすくします。デフォルトでは、アイコンはワークスペースから継承されます。アイコンを変更するには、[ギャラリー] から画像を選択するか、新しい画像をアップロードします。アップロードされた画像に、他の画像の中から特定しやすくするためのタグを設定します。
画像 [ギャラリー] では、.png および .jpeg ファイルのみがサポートされます。
-
-
[次へ] を選択します。
-
[ロボット] ページで、1 つまたは複数のロボットを選択します。
ロボットのリストが長い場合は、検索フィールドを使用して必要なロボットを見つけます。
-
複数のロボットを選択する場合は、ツールバーの [選択したロボット]
![[選択したロボット]](../../All_Images/prakappletsselrob.png "[選択したロボット]") ボタンを選択して、選択したロボットを表示します。選択したロボットの番号がボタンに表示されます。
ボタンを選択して、選択したロボットを表示します。選択したロボットの番号がボタンに表示されます。 -
[選択したロボット] ペインの [順次実行] ボタンを使用して、ロボットの実行順序を定義します。
-
[設定] ペインで、Management Console プロジェクトを基準としてロボットをフィルタします。
-
-
[次へ] を選択します。
-
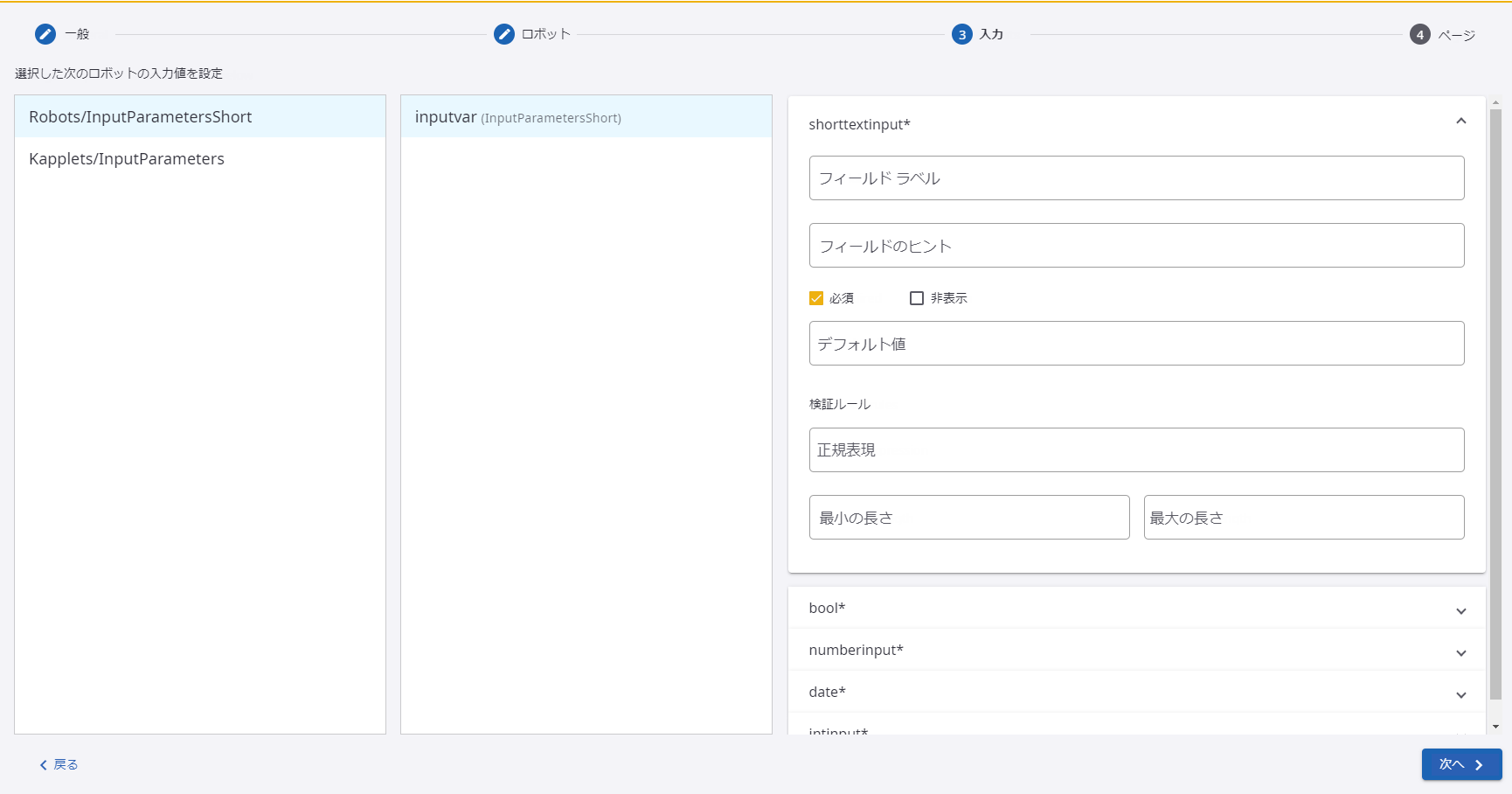
[入力] ページで、選択したロボットの入力パラメータを設定します。
選択したロボットのいずれかに入力パラメータが含まれている場合は、プロシージャにこのステップが追加されます。[入力] ページで入力パラメータと検証ルールを設定すると、それらは自動的に検証されます。エラーが返された場合は、入力パラメータおよび/または対応する検証ルールを修正してください。入力が有効な場合、[次へ] ボタンがアクティブになります。
-
ロボットを選択して、その変数タイプを表示します。
-
ロボット変数があるウィンドウで、変数を選択してその属性を設定します。
-
変数ウィンドウの隣のウィンドウに、すべての属性がリストされます。
-
入力フィールドの順序を変更するには、[開始] ページで順序を設定し (次の [ページ] の手順を参照)、テンプレートを保存した後に [テンプレートの並べ替え] オプションを有効にします。「テンプレートの並び替え」を参照してください。
-
[入力] ペインで、[開始] ページに表示する [フィールド ラベル] および [フィールドのヒント] を入力します。
-
必要に応じて [必須] および [非表示] チェック ボックスを選択して、[開始] ページにフィールドを表示する方法を設定します。
-
パラメータを個別に設定します。パラメータのセットは、各属性によって異なります。
-
-
[次へ] を選択します。
-
[ページ] ペインで、必要に応じて次の設定を行います。
-
[開始ページ] でページ タイトルを編集し、[ページ テキスト] フィールドにページの説明を入力します。
-
[フィールドの順序] リストでアイテムをドラッグして、フィールドの順序を変更します。
-
[ステータス ページ] でページ タイトルを編集します。
-
実行結果をテーブルに表示するには、ツールバーの [テーブル ページの追加]
 アイコンを選択します。
アイコンを選択します。-
[テーブル ページ] でページのタイトルおよび説明を編集します。
-
リストからロボットを選択して、そのパラメータを設定します。[返されるタイプ] リストは、選択したロボットの出力タイプで構成されています。
-
パラメータを選択してテーブルに表示されるそのフィールドを定義します。
-
[利用可能なコミット アクション] オプションを使用して、各ロボットにアクションをコミットするためのそれぞれ異なるロボットを割り当てます。「コミット アクションのロボットの選択」を参照してください。
-
-
実行結果をグラフで表示するには、ツールバーの [グラフ ページの追加]
 アイコンを選択します。
アイコンを選択します。-
[チャート ページ] でページのタイトルおよび説明を編集します。
-
リストからロボットを選択して、グラフに表示されるパラメータを設定します。
- 次のパラメータを選択します。
-
グラフのタイプ
-
配色
-
ラベル軸
-
データ軸
-
- 他のグラフ パラメータを設定します。
-
[プレビュー] ボタンを選択してグラフをプレビューします。
-
-
-
テンプレートを保存するには、[保存] を選択します。
テンプレートのオブジェクトは次のようになります。テンプレートから Kapplet を作成するには、Kapplets の作成を参照してください。
テンプレートの並び替え
[テンプレート] ビューには、ロボット名、入力変数名、および入力フィールドが表示されます。デフォルトでは、Kapplets 実行ページの「テンプレートの並べ替え」ボタンは無効になっています。このオプションを有効にすると、ビューには入力フィールドのみが表示されます。
デフォルトのビューを変更するには、[テンプレートの並べ替え] オプションを有効にします。このオプションを使用した場合でも、既存のテンプレートの入力フィールドの順序が並べ替えられることはないことに注意してください。
入力フィールドを並び替えるには、次の手順を実行します。
-
テンプレートの作成時に、[開始] ページで入力フィールドの順序を設定します。
-
Kapplets の実行を選択すると、新しい [開始] ページが開き、ロボット名、変数名、および入力フィールドが表示されます。
入力フィールドはデフォルトのビューに表示されます。
-
[テンプレートの並べ替え] を選択すると、テンプレートの [開始] ページで設定した順序と一致するように、デフォルトの入力フィールド ビューが変更されます。
テンプレートの編集
テンプレートを変更または削除するには、[コンテキスト メニューを開く] ボタンを選択します。
[入力] ページで入力パラメータと検証ルールを編集すると、それらは自動的に検証されます。エラーが返された場合は、入力パラメータおよび/または対応する検証ルールを修正してください。入力が有効な場合、[次へ] ボタンがアクティブになります。
コミット アクションのロボットの選択
2 台のロボットを連続して使用する場合、メイン ロボットの出力データを 1 台以上のサポート ロボットの入力データとして使用する必要がある場合があります。入力タイプと出力タイプを 1 つだけ持つようにそれぞれのサポート ロボットを設計します。プライマリ ロボットに複数の出力タイプがある場合は、アクションをコミットするために他のロボットを割り当てます。入力と出力のタイプは、サポートされるロボットで一致する必要があります。
次の手順では、ロボット間でデータを渡す方法について説明します。
-
[テンプレート] ページに移動します。
-
新しいテンプレートを作成するか、既存のテンプレートを編集します。
-
[ページ] ペインに到達するまで構成ペインの中を進みます。
-
選択したロボットの出力タイプで構成された [リターン タイプ] リストを見つけます。
アクションのコミットに利用可能なタイプと利用できないタイプは、別々のカードに表示されます。
-
[利用可能なコミット アクション] ペインで、リストからロボットを選択します。
利用可能なリターン タイプに、すべてのロボットを同時に割り当てることができます。
入力タイプと出力タイプを同じにする必要があります。使用するタイプの前に、「コミット アクションに使用できるロボットはありません」という通知が表示されているかどうかをよく確認してください。
-
プライマリ ロボットを実行します。
-
プライマリ ロボットの実行が完了した後に、[履歴] ページを選択します。
-
[テーブル ページ] タブで、前の手順で設定したサポート ロボットのリストを表示します。
-
[コミット アクションの選択] チェックボックスをオンにして、1 つ以上のサポートされるロボットを選択します。
-
[コミット アクション] ボタンがアクティブになった後に、そのアクションを選択して実行結果を表示します。
同じロボットを 2 回実行することはできません。
-