Prepare automation devices
The automation devices that Robots can run are the following: a local Windows computer, the one the Robot is running on, or a remote Windows computer at some IP address that the Robot can reach. The remote computer must run a Desktop Automation Service that allows the Robot to control that computer.
To automate terminal sessions, see Automate terminal emulators.
-
To connect to a remote computer in the workflow of your project, create a device mapping first. To do so, click . Create a new mapping, then proceed to editing the Robots
 . See
Add automation device mapping.
. See
Add automation device mapping.
-
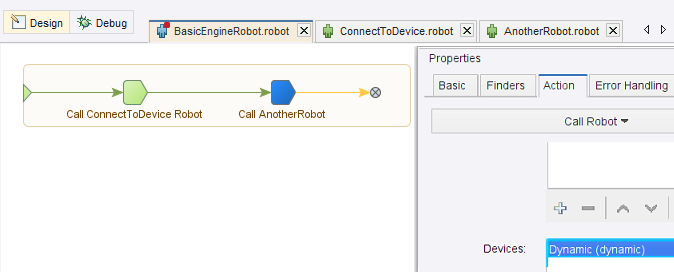
Provide a device reference by clicking Add
 in the
Devices field on the
Action tab of the Call Robot step in the Basic Engine Robot
in the
Devices field on the
Action tab of the Call Robot step in the Basic Engine Robot
 .
.
-
In the Add Device window, select Static Reference, Dynamic Reference, or Trigger Reference.
-
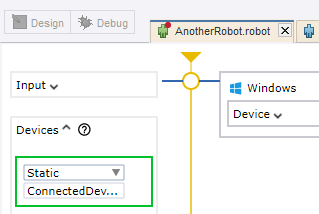
Static reference implies that you created one or more automation device mappings to choose from. The robot automates the devices associated with the selected mapping. Mapping information is required for automating Windows devices and it is not required for automating terminals, working with the built-in browser, and with the built-in Excel driver for Robots. If you change the mapping, click Refresh in Design Studio to renew the connection. Use static reference when using Local Desktop Automation.
-
Dynamic reference is a type of reference that helps you connect to automation devices in Single User Mode, such as by using the Remote Desktop Protocol (RDP) connection. Specify a mapping name to use in the Connect to Device step. All other connection parameters are specified within the Robot workflow. Once the Dynamic Reference connection is used by the robot in the Call Robot step and the device is connected, the connection stays alive and you can use this reference (and this device) in the next Call Robot steps in your robot.
You can only connect to the same device once during the execution of a workflow. For example, if you want to connect to a device in a loop, make sure your robot skips the connection step in the loop when the connection is already established.
-
Trigger reference implies that you created one or more Automation Device mappings to choose from. Attended automation robots connect to devices associated with the selected mapping. When creating a device mapping, specify host, port, and a token of the device. See Add automation device mapping.
Do not provide any references for the operations run on the local computer, such as accessing websites in the built-in browser and working with Excel spreadsheets in the built-in Excel driver. "local" reference is always available by default whether any other references are provided or not.
-
-
If you added automation devices in the previous steps, edit the Robot
. See
Edit Robot
and
Devices
definitions.
Pass dynamic devices between robots
A static device in a robot is a device to which the connection is already established. If a dynamic mapping is specified for a Call Robot step in the Devices property of the Basic Engine Robot, and the device has previously been connected to, this dynamic mapping can be passed to a static device. In other words, if the device is previously connected using dynamic mapping, in the Devices pane in the robot, you can select to use a static device and reuse the connection established with the dynamic mapping. This is convenient when you need to reuse this robot in different Basic Engine Robots.