Options de configuration de base
Configuration de base sans la gestion du cycle de vie du robot
Le schéma suivant illustre une configuration de base recommandée Kofax RPA sans gestion du cycle de vie du robot. Cette configuration se compose de deux Management Consoles : l'une pour le développement et l'autre pour la production.

Dans cet exemple de configuration, le développeur de robot établit la synchronisation (1) avec un projet stocké dans le développement Management Console, crée de nouveaux objets ou apporte des modifications aux objets existants, puis synchronise à nouveau le projet avec ce Management Console.
Lorsque le responsable de la promotion envisage un projet pour la production, il effectue une sauvegarde de ce projet (2) ou d'objets particuliers du développement Management Console et télécharge ensuite la sauvegarde (3) vers la production Management Console.
Sans configuration de la gestion du cycle de vie du robot, cette configuration ne prend pas en charge les fonctionnalités suivantes :
- Historique précis des versions pour chaque objet d'un projet.
- Possibilité de savoir quelle version est actuellement en production, de voir l'auteur d'une modification, la date de la dernière modification d'un objet et un message expliquant les modifications.
- Capacité à promouvoir la version spécifique d'un objet, du développement à la production.
- Possibilité de revenir rapidement à une version précédente de l'objet en production.
- Capacité à inverser les changements de rupture dans l'environnement de développement.
Pour inclure toutes ces fonctionnalités dans votre environnement Kofax RPA, vous pouvez définir une configuration de base avec la gestion du cycle de vie du robot, comme indiqué dans la rubrique suivante.
Configuration de base avec la gestion du cycle de vie du robot
Le schéma suivant illustre une configuration de base Kofax RPA recommandée avec la gestion du cycle de vie du robot. Cette configuration montre deux instances de Management Console qui partagent un seul répertoire : une instance pour le développement et une instance pour la production.
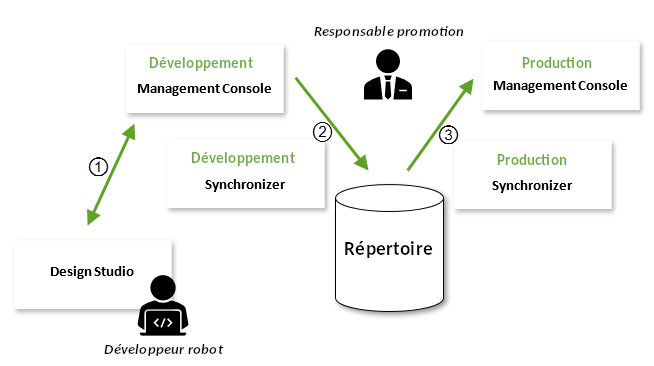
Dans cet exemple, le développeur du robot établit une synchronisation (1) avec un projet stocké dans le développement Management Console.
Chaque fois qu'un développeur de robot met à jour le projet dans le développement Management Console, les changements sont automatiquement synchronisés (2) avec le répertoire partagé ; ils sont envoyés comme une validation de changement sur la branche spécifiée. La responsabilité du directeur de la production est d'indiquer la branche à utiliser dans la production.
À ce stade, deux méthodes sont possibles pour promouvoir le changement :
-
Fusionner, refonder, choisir ou apporter des modifications à la branche spécifiée dans la production Management Console.
-
Il suffit de spécifier la production Management Console à la nouvelle version.
Lorsque le responsable de la promotion approuve les changements, la production Synchronizer prend les changements (3) du répertoire et les pousse ensuite vers la production Management Console.
Dans les rubriques suivantes, nous allons recréer cette configuration étape par étape.