Mode d'exécution d'un robot
Kofax RPADesign Studio prend en charge deux modes d'exécution d'un robot en temps réel : Exécution minimale (directe) et Ré-exécution intelligente (complète). Cette rubrique fournit des informations sur les deux modes.
Lors de la création d'un Robot à Moteur Basique ![]() , vous pouvez sélectionner le mode d'exécution dans l'assistant du nouveau robot. Utilisez l'onglet Mode Conception de la configuration du robot pour afficher ou modifier le mode d'exécution. Notez que le choix du mode d'exécution du robot n'a d'incidence que sur l'exécution en mode Conception, et pas en mode Débogage ou lors de l'exécution dans RoboServer.
, vous pouvez sélectionner le mode d'exécution dans l'assistant du nouveau robot. Utilisez l'onglet Mode Conception de la configuration du robot pour afficher ou modifier le mode d'exécution. Notez que le choix du mode d'exécution du robot n'a d'incidence que sur l'exécution en mode Conception, et pas en mode Débogage ou lors de l'exécution dans RoboServer.
Le mode Ré-exécution intelligente est le seul mode qui prend en charge le workflow dans les robots  . L'exécution initiale du workflow met en cache l'état des variables renvoyées, et les variables mises en cache ne sont pas mises à jour lorsque le workflow est mis à jour. La modification du workflow n'actualise pas l'état de la variable mise en cache. Vous devez ré-exécuter tout le robot pour mettre à jour les valeurs des variables renvoyées par le workflow.
. L'exécution initiale du workflow met en cache l'état des variables renvoyées, et les variables mises en cache ne sont pas mises à jour lorsque le workflow est mis à jour. La modification du workflow n'actualise pas l'état de la variable mise en cache. Vous devez ré-exécuter tout le robot pour mettre à jour les valeurs des variables renvoyées par le workflow.
Ré-exécution intelligente (complète)
En mode Ré-exécution intelligente, la façon dont le robot est exécuté en mode Conception est similaire à la façon dont il est exécuté lors de l'exécution ou en mode Débogage. Il s'agit du mode par défaut des Robots à Moteur Basique ![]() .
.
Par exemple, lorsque vous cliquez sur l'étape C dans le robot suivant, il s'exécute automatiquement par la branche inférieure de la construction Tentative lorsque le test échoue dans l'étape Tester la valeur :

L'icône de point d'exclamation bleu dans l'étape Tester la valeur indique que le traitement des erreurs pour l'étape Essayer l'alternative suivante a été déclenchée.
Avec les étapes de boucle, toutes les itérations jusqu'à l'itération sélectionnée incluse sont exécutées en cliquant sur une étape dans la boucle.
Dans l'exemple suivant, si vous cliquez sur l'étape C, vous provoquez l'exécution de trois itérations de la boucle.

De plus, si vous cliquez sur une étape dans une branche en dessous d'une boucle, toutes les itérations de la boucle sont exécutées. Pour un exemple, reportez-vous au robot suivant.

Si vous cliquez sur l'étape D, vous provoquez l'exécution de l'étape A et l'exécution répétée des étapes B et C (autant de fois qu'il y a d'itérations dans la boucle B) avant l'arrêt finalement à l'étape D.
Le mode Ré-exécution intelligente est particulièrement utile lorsque vous travaillez avec des variables globales, et que vous disposez d'étapes ultérieures dans le robot qui dépendent de variables précises. Ce mode peut être utile pour créer une charge utile pour un appel de service web (REST ou SOAP), ou pour construire un document Excel. Le document XML ou Excel en cours de remplissage réside dans une variable globale, tandis que son contenu est ajouté pendant l'exécution d'une boucle. Dans une branche située en dessous de la boucle qui remplit le document, le robot prend le document entier et le publie sur un service web ou similaire. Dans ce cas, le mode Ré-exécution intelligente facilite la construction du robot, car il garantit que le document est rempli lors du test de l'appel du service web en mode Conception.
En mode Ré-exécution intelligente, l'interaction avec le monde extérieur sous forme de sites web, de bases de données ou de services web est mise en cache. La mise en cache évite la ré-exécution des étapes à moins que la condition préalable au stockage du résultat de l'exécution n'ait changé (comme une variable qui détermine l'URL à charger). Le mode Ré-exécution intelligente utilise plus de mémoire que le mode Exécution minimale.
Nous ne recommandons pas d'utiliser le mode Ré-exécution intelligente pour les gros robots ayant une interaction importante avec le monde extérieur, ou pour les robots à longue exécution. La durée d'exécution et l'utilisation de la mémoire sont trop élevés dans ces cas.
Pour réduire le temps d'exécution lors de la conception du robot, vous pouvez cliquer avec le bouton droit de la souris sur une branche et la désactiver dans Design Studio. Un réglage similaire peut être appliqué en mode « Débogage ». En outre, vous pouvez désactiver la branche en fonction d'une condition spécifiée dans certaines itérations.
Configuration de la connexion

L'onglet Mode Conception de la configuration du robot comporte également une option « Éviter une ré-exécution externe ». Lorsqu'elle est cochée, elle garantit que les étapes ne sont jamais ré-exécutées, même lorsque le résultat en cache de l'exécution précédente ne peut pas être utilisé. Dans ce cas, vous pouvez toujours modifier le robot, mais sans état d'entrée actuel sur lequel travailler. Utilisez cette option uniquement pour répondre aux exigences d'interaction avec le monde extérieur afin d'éviter une nouvelle exécution (par exemple, si la nouvelle exécution devait entraîner des données incorrectes ou doubles dans le système d'un partenaire).
Certaines étapes ne sont pas disponibles en mode Ré-exécution intelligente. Pour la liste des étapes non disponibles, consultez la section « Mode d'exécution » dans la rubrique Limitations Kofax RPA.
Exécution minimale (directe)
Le Exécution minimale (directe) est le mode d'exécution traditionnel Design Studio. Tous les robots écrits dans des versions antérieures à la version 9.5 utiliseront ce mode d'exécution.
Lorsque vous cliquez sur une étape en mode Exécution minimale dans le graphique du robot, Design Studio prend le chemin direct le plus court vers cette étape, en ignorant les branches et les itérations précédentes qui ne sont pas sur le chemin direct.
Prenons l'exemple ci-dessous :
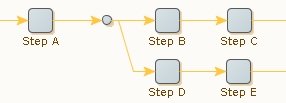
Pendant l'exécution runtime, le robot doit normalement exécuter les étapes A, B, C et D avant d'atteindre l'étape E. Mais en mode Conception, si vous cliquez sur l'étape E, cela n'entraîne que l'exécution des étapes A et D.
De même, si l'étape réside dans une boucle, seule l'itération sélectionnée est exécutée.

Comme le compteur d'itérations est réglé sur 3, le fait de cliquer sur l'étape C entraîne l'exécution uniquement des étapes A, B et C, où l'étape B sélectionne la troisième itération.
Le mode Exécution minimale est optimisé pour exécuter le moins d'étapes possible. Ce mode est utile lorsque vous disposez de gros robots et d'étapes dont l'exécution dure longtemps, comme les étapes qui interagissent avec des sites web complexes. En général, nous recommandons d'utiliser le mode Exécution minimale pour la plupart des cas d'utilisation de la collecte de données et pour les robots qui effectuent une interaction importante avec des sites externes.
L'inconvénient de ce mode est qu'il nécessite l'intervention de l'utilisateur pour sélectionner le chemin d'une étape donnée lorsqu'il ne peut pas s'exécuter directement dans l'étape en utilisant le chemin par défaut. Par exemple, des étapes Tentatives dans un chemin peuvent empêcher un robot de suivre la branche la plus haute.
Reportez-vous à l'exemple suivant.

Lorsque vous cliquez sur l'étape C, le mode Exécution minimale ne peut pas continuer si le test échoue dans l'étape Tester la valeur. Dans ce cas, vous devez d'abord cliquer explicitement sur la branche inférieure de l'étape de tentative pour orienter le chemin d'exécution vers l'étape C.