Connexions et flux d'exécution
Utilisez des connexions pour déterminer le flux d'exécution entre les étapes.
Les exemples présentés dans cette rubrique sont basés sur le mode d'exécution de conception Exécution minimale (directe).
Considérons le robot simple suivant :

Ce robot se compose de trois étapes : Étape A, Étape B et Étape C. En supposant qu'aucune erreur ne se produise et que chaque étape génère exactement un état de sortie du robot, le robot est exécuté comme suit : Un état initial du robot est généré et utilisé comme entrée à l'étape A (la première étape). L'étape A produit un état de robot de sortie. Cet état de robot de sortie est l'état de robot d'entrée de l'étape B. De même, l'étape B produit un état de robot, qui est l'état de robot d'entrée de l'étape C. Une fois que l'étape C a exécuté et produit un état de sortie de robot, l'exécution se termine. En bref, l'exécution des étapes est décrite comme suit : « A, B, C. »
Parfois, une étape ne génère aucun état de robot de sortie lorsqu'elle est exécutée. Cela se produit lorsqu'une erreur ou une étape de test entraîne la poursuite de l'exécution à un autre endroit du robot (voir Conditions et traitement des erreurs).
Les étapes contenant une activité Boucle peuvent traiter l'état d'entrée plusieurs fois, produisant à chaque fois un état de robot distinct. Considérons le robot suivant où l'étape B contient une activité de boucle :
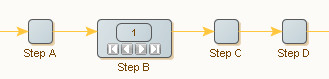
En supposant qu'il n'existe pas d'erreurs ou d'étapes de test, que l'étape B produise trois états de robot et que toutes les autres étapes produisent exactement un état de robot, les étapes sont exécutées dans l'ordre suivant : « A, B[1], C, D, B[2], C, D, B[3], C, D », où B[N ] fait référence à la Nième itération de l'activité de boucle contenue dans l'étape B. Notez que les états de robot de sortie de l'étape B sont des états de robot différents : chaque itération produit un nouvel état de robot. Ainsi, l'étape C reçoit un nouvel état de robot d'entrée chaque fois qu'elle est exécutée.
Une étape peut être connectée à plusieurs étapes. C'est ce qu'on appelle un « branchement ». Considérons le robot suivant :
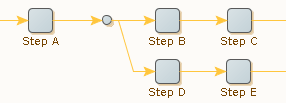
Dans ce robot, l'étape A est suivie d'un point de branchement, où la connexion se divise en deux branches. Une branche se compose des étapes B et C, et une autre, des étapes D et E. Toutes les branches sortant d'un point de branchement sont exécutées, l'une après l'autre. Par conséquent, en supposant qu'aucune erreur ou étape de test ne modifie le flux de contrôle et que chaque étape génère exactement un état de robot de sortie, le robot précédent est exécuté comme suit : A, B, C, D, E. Cependant, il est important de noter que l'étape B et l'étape D reçoivent chacune une copie du même état de robot de sortie produit par l'étape A.
Les branches peuvent fusionner, et d'une manière complexe. Considérons le robot suivant :
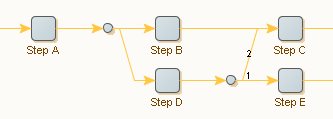
Ce robot montre la façon dont les connexions peuvent être ordonnées explicitement. Dans ce robot, les branches de l'étape D sont exécutées dans l'ordre spécifié par les numéros : l'étape E est exécutée avant l'étape C. Si un ordre n'est pas spécifié (par les numéros), les connexions sont exécutées de haut en bas. Ainsi, en supposant qu'il n'existe pas d'étapes de test, qu'aucune erreur ne se produit et que chaque étape génère exactement un état de sortie de robot, le robot est exécuté comme suit : A, B, C, D, E, C. La première fois que l'étape C est exécutée, elle reçoit l'état de robot de sortie produit par l'étape B. La deuxième fois que l'étape C est exécutée, elle reçoit l'état de robot de sortie produit par l'étape D.
Parfois, vous souhaitez sélectionner (exécuter) une seule de plusieurs branches, selon les cas. La rubrique Conditions et traitement des erreurs explique comment procéder.